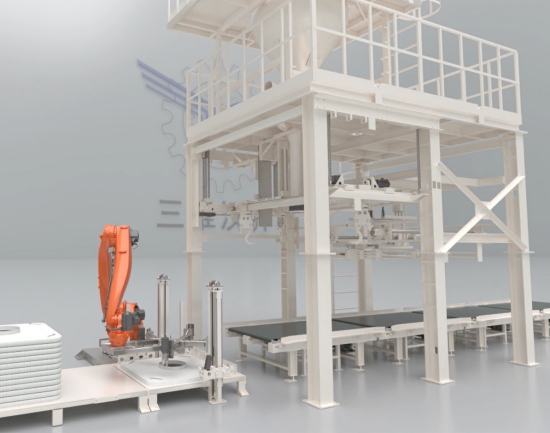
托盤翻轉全自動裝車機的工作原介紹
托盤翻轉全自動裝車機是一種高度自動化、智能化的物流裝卸設備,旨在替代傳統的人工或叉車裝卸方式,極大地提高了效率、安全性和空間利用率。
核心設計理念
它的核心設計理念是:將水平放置的單元化貨物(通常是碼放在托盤上的紙箱、袋裝物等),通過一個翻轉機構,使其變為垂直狀態,然后有序地、緊密地碼放到運輸車輛的車廂內。
系統主要組成部分
要理解其工作原理,首先需要了解它的幾個關鍵部分:
1.入庫輸送線:負責將滿載貨物的托盤從倉庫輸送至翻轉機工位。
2.托盤定位與夾抱機構:在翻轉前,對托盤進行精確定位,并用夾抱臂牢牢固定住整垛貨物,防止在翻轉過程中散落。
3.翻轉機構:整個設備的核心。通常是一個巨大的“回旋臂”或“翻轉平臺”,它能將夾抱住的貨物整體平穩地翻轉90度,從水平變為垂直。
4.拆盤/分層機構:貨物翻轉垂直后,需要將其從托盤上取下。常見的方式有:
推板式:一個推板將整層貨物從托盤上推出,送至裝車臂。
吸盤式:機器人或機械臂使用真空吸盤,一次吸取一層或單個貨物。
夾抱式:用夾具將整層貨物夾取移走。
5.裝車執行機構(機械臂/滑臺):接收從拆盤機構送來的貨物,并將其精確地放置到車廂內的指定位置。這可以是一個多自由度的工業機器人,或一個能在三維空間移動的龍門架系統。
6.智能控制系統:設備的“大腦”。通常包括:
PLC(可編程邏輯控制器):控制所有動作的順序和邏輯。
3D視覺系統:對車廂內部進行掃描,建立三維模型,識別車廂尺寸、位置以及已碼放貨物的形狀。
運動控制軟件:根據視覺系統的數據和預設的碼垛算法,計算出最優的碼放路徑和順序。
詳細工作流程(分步解析)
整個過程可以概括為 “進、翻、取、放、碼”五個步驟:
第一步:自動上料與定位
滿載貨物的托盤通過輸送線被運送到翻轉工位。光電傳感器或視覺系統檢測托盤到位后,輸送線停止。兩側或上方的夾抱機構動作,將整垛貨物緊緊抱住,確保其穩定性。
第二步:整體平穩翻轉
夾抱機構鎖定后,翻轉機構開始動作。它帶動整個夾抱機構和其上的貨物,作為一個剛性整體,緩慢而平穩地旋轉90度。此時,原本在底部的托盤變成了在貨物的“背后”,而貨物的側面則變成了朝向車廂的“裝載面”。這個過程要求非常平穩,加速度控制精準,以防貨物失穩或倒塌。
第三步:分離貨物與托盤
貨物翻轉到位后,拆盤/分層機構開始工作。
如果是推板式,推板會向前運動,將最前面的一層貨物從托盤上“推”到等待的裝車臂或傳送帶上,同時后面的貨物被擋板擋住。托盤則被保留在翻轉機構上。
如果是吸盤式,吸盤機械臂會移動到貨物表面,吸附住最前面的一層,然后將其“取”走。
第四步:智能識別與路徑規劃
與此同時,安裝在裝車平臺上的3D攝像頭會對停靠的貨車車廂進行掃描。系統獲取車廂的實際尺寸、內部障礙物(如突出的棱角)、以及已碼放貨物的輪廓。控制軟件根據這些實時數據,結合貨物的尺寸,智能計算出最優的碼放方案:
碼放順序:先放哪,后放哪。
碼放:如何交錯堆疊以增加穩定性。
避障路徑:機械臂如何移動才能不碰撞到車廂壁和已碼放的貨物。
第五步:精準抓取與碼放
裝車機械臂(或龍門架)從拆盤工位接取到貨物(一層或一箱),然后嚴格按照規劃好的三維運動軌跡,將貨物精準地放置到車廂內的目標位置。機械臂可以靈活地調整姿態,將貨物“塞”進狹窄的空間,實現緊密堆疊。
第六步:循環與復位
當一層貨物被取走后,翻轉機構可能會有一個微小的推送動作,使下一層貨物就位,等待下一次抓取。
當整個托盤上的貨物被全部取完時,空的托盤會被釋放,通過回流輸送線送回倉庫。同時,新的滿載托盤被送入,開始下一個循環。
機械臂會持續工作,直到整個車廂按照預設方案裝滿為止。

主要技術優勢
1.極高的效率:連續自動化作業,速度遠超人工,可24小時不間斷運行。
2.超高的空間利用率:貨物垂直碼放,可以充分利用車廂的高度空間,實現“頂天立地”式的裝載,裝載率可達95%以上。
3.無人化操作:完全替代了繁重、重復且有一定危險性的人工裝卸作業,降低了人工成本和工傷風險。
4.貨物損傷率低:平穩的夾抱、翻轉和精準的機械臂放置,避免了人工搬運中的拋擲、碰撞,有效保護了貨物。
5.數據化和柔性化:通過3D視覺和智能算法,能自適應不同的車型、貨物尺寸和包裝形式,實現柔性化生產。同時,可以記錄每一車的裝載數據,便于管理。
應用場景
主要用于需要高效率、大批量裝車的行業,如:
食品飲料行業(箱裝飲料、零食)
化工行業(袋裝化肥、飼料)
家電行業(箱裝空調、洗衣機)
造紙行業(紙箱、卷紙)
物流快遞分撥中心
托盤翻轉全自動裝車機通過將 “水平堆垛”巧妙地轉換為 “垂直碼放”,并結合 機器人技術和 機器視覺,完美地解決了裝車環節的自動化難題,是現代智能物流系統中至關重要的一環。
- 上一篇:噸袋全自動包裝機助力鋰電池材料企業高質量發展
- 下一篇:請返回上一篇









 ??魯公網安備 ?37040202006018號
??魯公網安備 ?37040202006018號
